CVbaseline-GoogleNet系列模型笔记
1.相关研究
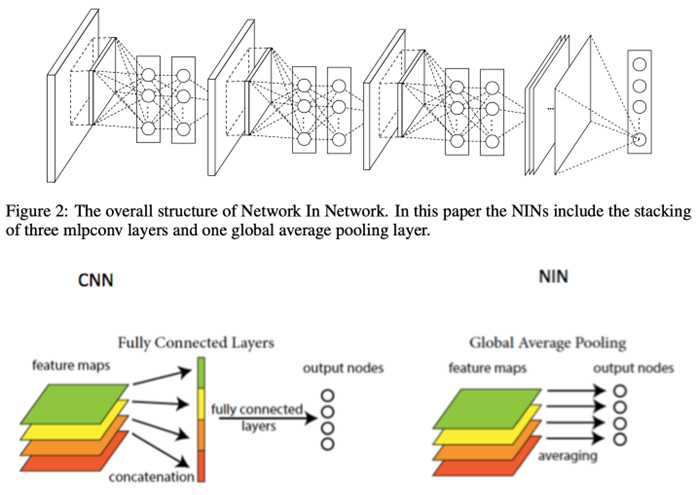
1.NIN(Network in Network):首个采用$1\times 1$卷积的卷积神经网络,舍弃全连接层,大大减少网络参数。
特点:
- $1\times 1$卷积
- GAP输出(Global Average Pooling全局平均池化)
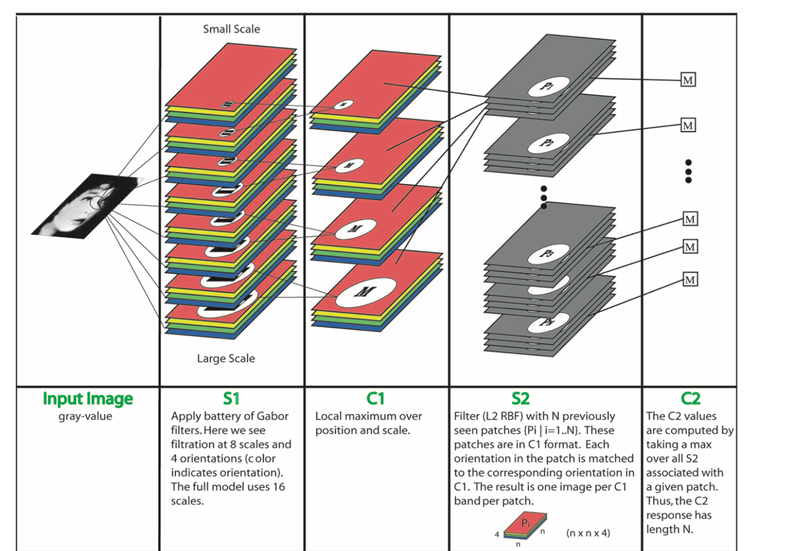
2.Robust Object Recognition with Cortex-Like Mechanisms :多尺度Gabor滤波器提取特征
特点:S1层采用8种尺度Gabor滤波器进行提取不同尺度特征
3.Hebbian principle(赫布理论):
“Cells that fire together, wire together”
(一起激发的神经元连接在一起)
2.研究成果
| 模型 | 时间 | top-5 |
|---|---|---|
| AlexNet | 2012 | 15.3% |
| ZFNet | 2013 | 13.5% |
| VGG | 2014 | 7.3% |
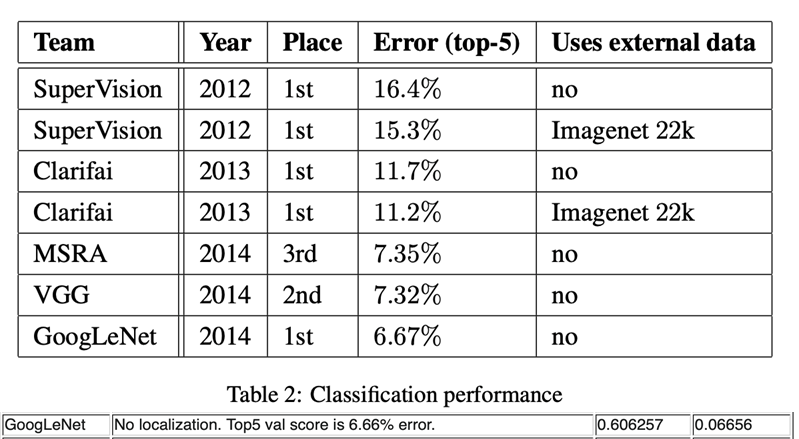
| GoogLeNet | 2014 | 6.6% |
ILSVRC成绩:
- GoogLeNet:分类第一名,检测第一名,定位第二名
- VGG:定位第一名,分类第二名
研究意义:
- 开启多尺度卷积时代
- 拉开$1\times 1$卷积广泛应用序幕
- 为GoogLeNet系列开辟道路
3.摘要
- 本文主题:提出名为Inception的深度卷积神经网络,在ILSVRC-2014获得分类及检测双料冠军
- 模型特点1:Inception特点是提高计算资源利用率,增加网络深度和宽度时,参数少量增加
- 模型特点2:借鉴Hebbain理论和多尺度处理
4.GoogleNet结构
4.1 Inception module
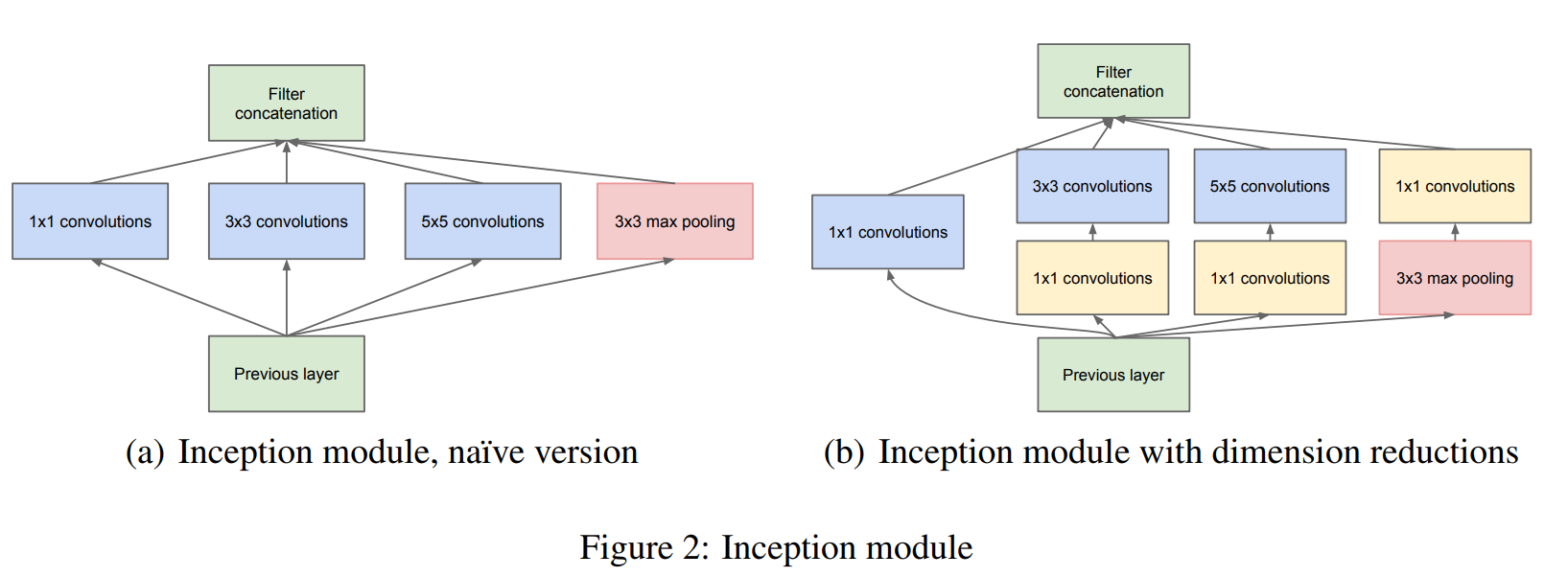
特点:
- 多尺度(采用不同尺度的卷积核提取特征,多个分支进行处理)
- $1\times1$卷积降维,信息融合
- $3\times3$max pooling保留了特征图数量
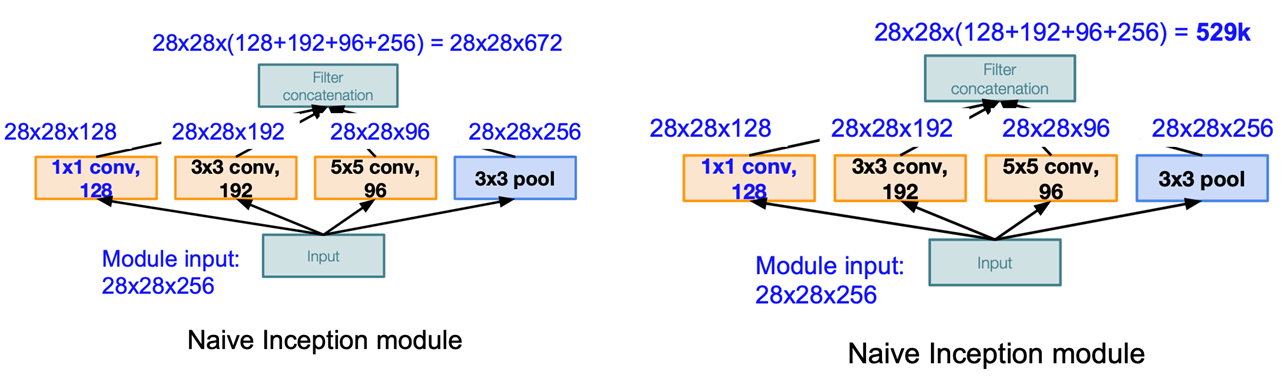
$3\times 3$ pool 可让特征图通道数增加,且用较少计算量
- 缺点:数据量(特征图)激增,计算量很大
- 解决方法:引入$1\times 1$卷积压缩厚度(试图减少卷积层输入的通道数量)。

Inception代码:
1 | class Inception(nn.Module): |
基本卷积层定义:
1 | class BasicConv2d(nn.Module): |
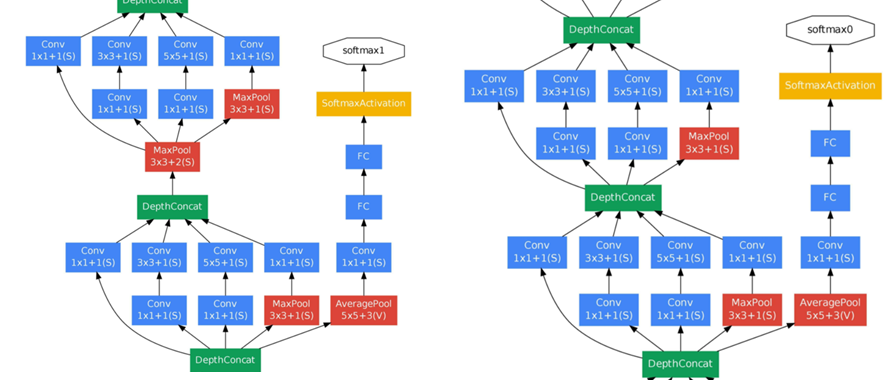
4.2 GoogLeNet
- 蓝色:卷积
- 红色:池化
- 绿色:LRN/特征融合
- 黄色:激活函数
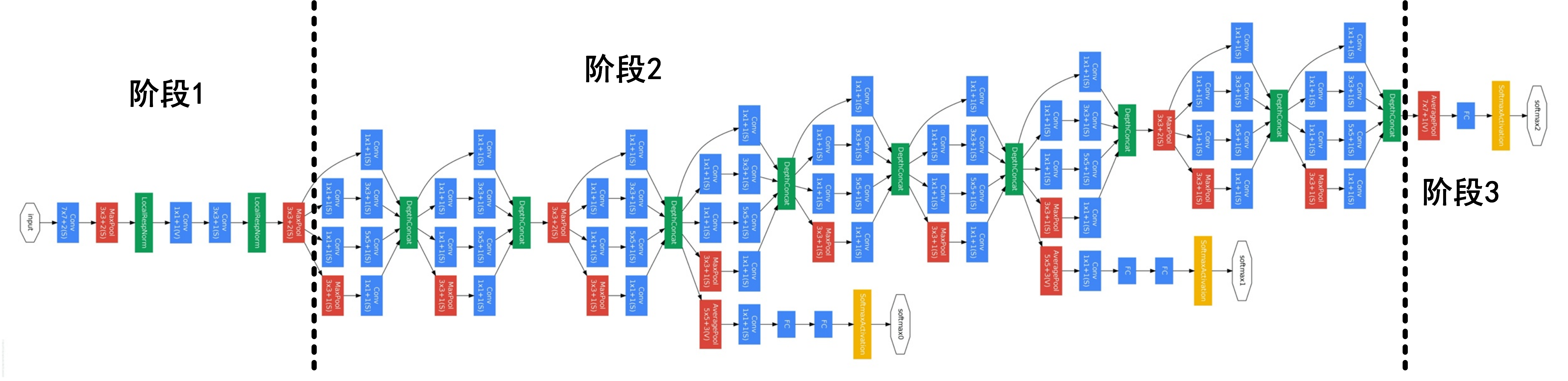
三阶段:
- conv-pool-conv-pool 快速降低分辨率
- 堆叠Inception:堆叠使用Inception Module,达22层
- FC层分类输出
附:增加两个辅助损失(图中下部的两个特殊分支),缓解梯度消失(中间层特征具有分类能力)
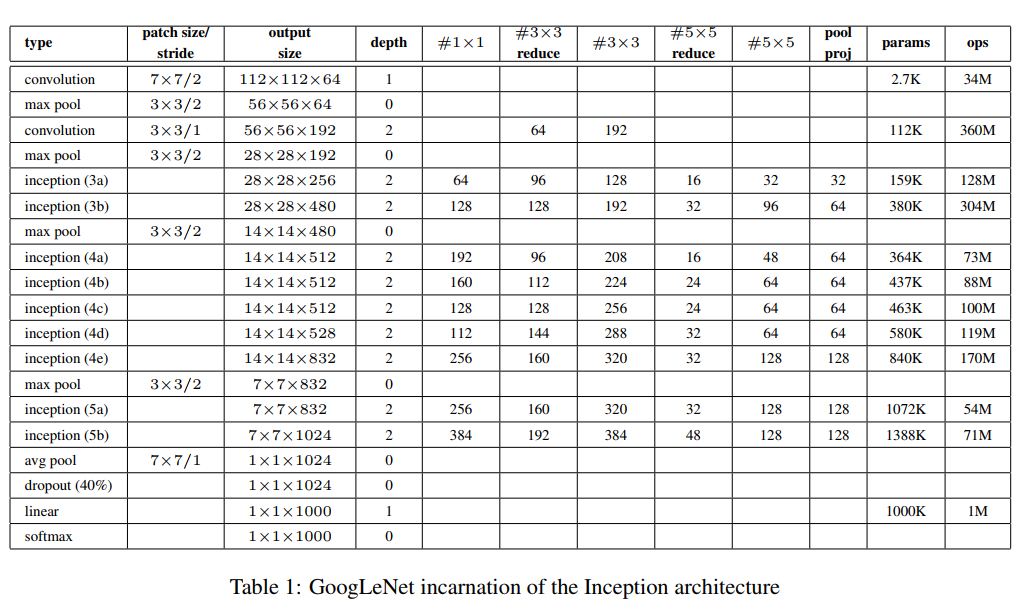
上面的结构特点:5个Block,5次分辨率下降,卷积核数量变化魔幻,输出层为1层FC层。
网络代码:
1 | from collections import namedtuple |
5.训练技巧
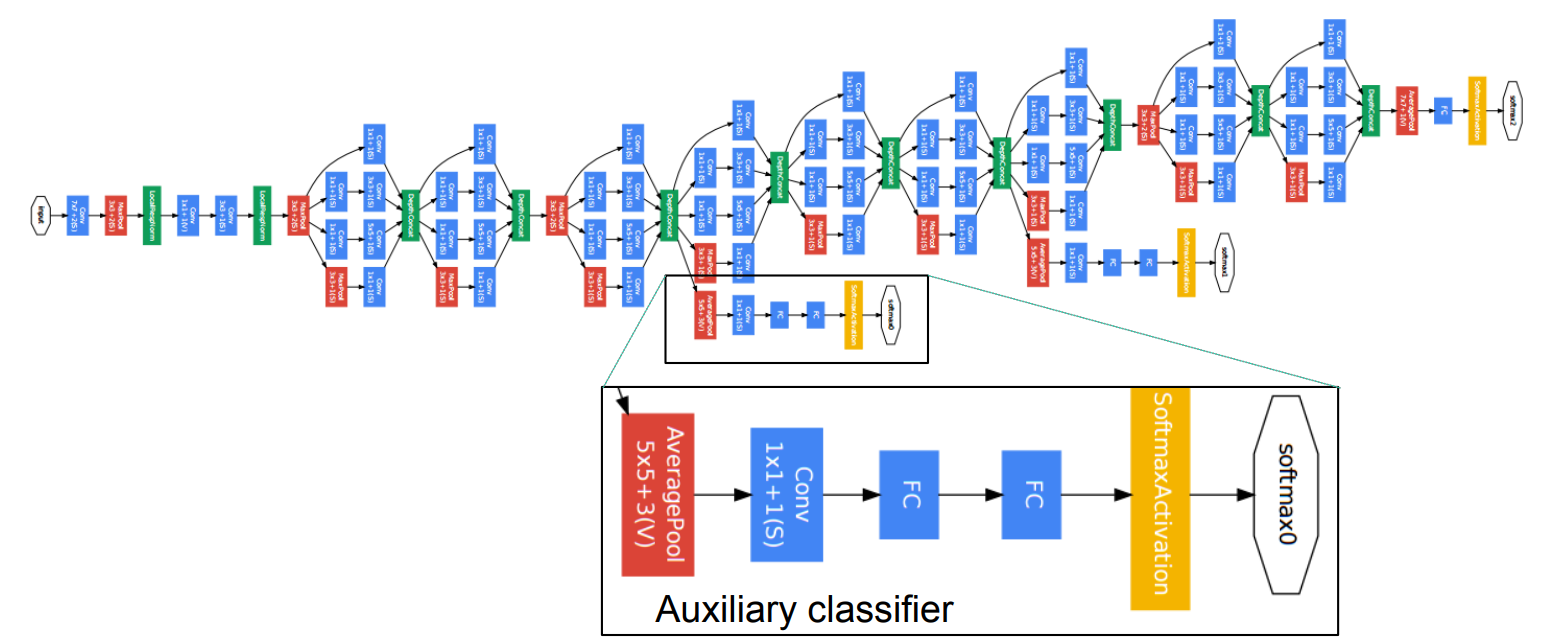
1.辅助损失:在Inception4b和Inception4e增加两个辅助分类层,用于计算辅助损失,达到:
增加loss回传
充当正则约束,迫使中间层特征也能具备分类能力
1 | # 辅助损失定义 4a 4d |
2.学习率下降策略:每8个epoch下降4%:fixed learning rate schedule (decreasing the learning rate by 4% every 8 epochs)$0.96^{100 }= 0.016$, 800个epochs,才下降不到100倍。
3.数据增强:指导方针如下:
- 图像尺寸均匀分布在8%-100%之间,进行随机裁剪。
- 长宽比在$[3/4, 4/3]$之间
- 光度畸变可以减轻过拟合,Photometric distortions 有效,如亮度、饱和度和对比度等
6.测试技巧
1. Multi crop:1张图变144张图
- Step1: 等比例缩放短边至256, 288, 320, 352,四种尺寸。 一分为四
- Step2: 在长边上裁剪出3个正方形,左中右或者上中下,三个位置。 一分为三
- Step3: 左上,右上,左下,右下,中心,全局resize,六个位置。一分为六
- Step4: 水平镜像。一分为二
$4\times 3\times 6\times 2 = 144$
2. Model Fusion
七个模型训练差异仅在图像采样方式和顺序的差异

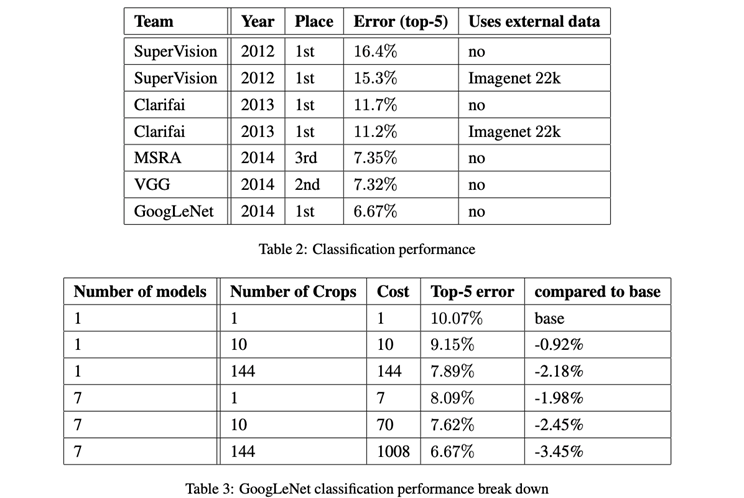
7.模型结果
分类结果:
- 模型融合: 多模型比单模型精度高。
- Multi Cros:crop越多,精度越高
检测结果:
模型融合: 多模型比单模型精度高
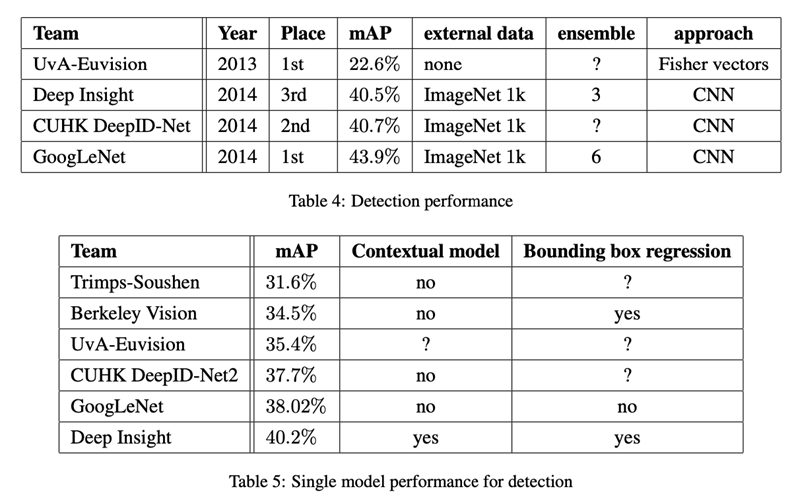
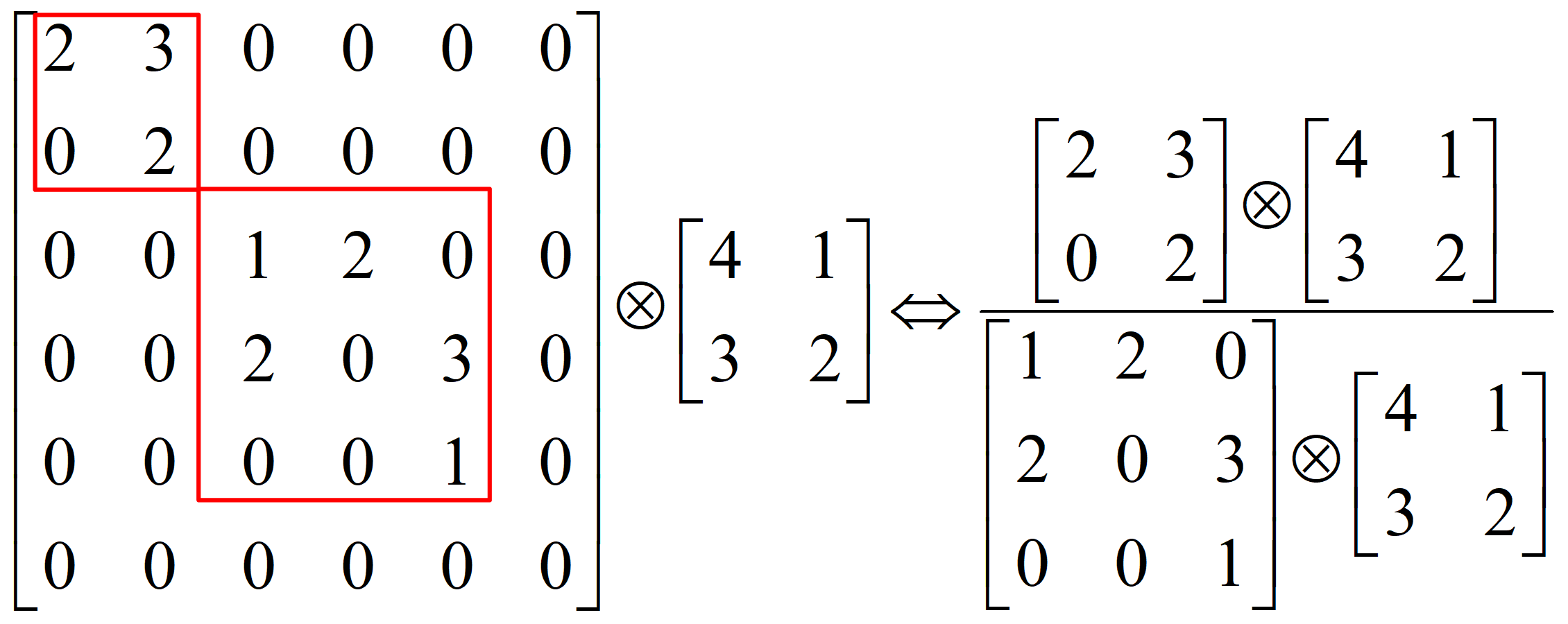
8.稀疏结构
稀疏矩阵:数值为0的元素数目远远多于非0元素的数目, 且无规律
稠密矩阵:数值非0的元素数目远远多于为0元素的数目, 且无规律
稀疏矩阵优点是,可分解成密集矩阵计算来加快收敛速度。稀疏矩阵中0较多的区域就可以不用计算,计算量就大大降低。
特征图通道的分解
672个特征图分解为四个部分
- $1\times1$卷积核提取的 128个通道
- $3\times 3$ 卷积核提取的192个通道
- $5\times 5$卷积核提取的96个通道
- $3\times3$池化提取的256个通道
打破均匀分布,相关性强的特征聚集在一起
【思考】Inception的设计思路:
- 在直观感觉上在多个尺度上同时进行卷积,能提取到不同尺度的特征。特征更为丰富也意味着最后分类判断时更加准确。
- 利用稀疏矩阵分解成密集矩阵计算的原理来加快收敛速度。在inception上就是要在特征维度上进行分解。inception模块在多个尺度上提取特征,输出的256个特征就不再是均匀分布,而是相关性强的特征聚集在一起(比如$1\times1$的的96个特征聚集在一起,$3\times3$的96个特征聚集在一起,$5\times5$的64个特征聚集在一起)。这样的特征集中因为相关性较强的特征聚集在了一起,不相关的非关键特征就被弱化,同样是输出256个特征,inception方法输出的冗余信息较少。
- Hebbin赫布原理。赫布认为“两个神经元或者神经元系统,如果总是同时兴奋,就会形成一种‘组合’,其中一个神经元的兴奋会促进另一个的兴奋”。在inception结构中就是要把相关性强的特征汇聚到一起,把$1\times1,3\times3,5\times5$的特征分开。因为训练收敛的最终目的就是要提取出独立的特征,所以预先把相关性强的特征汇聚,就能起到加速收敛的作用。
9.总结
关键点&创新点
- 大量使用$1\times1$,可降低维度,减少计算量,参数是AlexNet的是十二分之一
- 多尺度卷积核,实现多尺度特征提取
- 辅助损失层,增加梯度回传,增加正则,减轻过拟合
总结:
- 池化损失空间分辨率,但在定位、检测和人体姿态识别中仍应用。延伸拓展:定位、检测和人体姿态识别这些任务十分注重空间分辨率信息。
- 增加模型深度和宽度,可有效提升性能,但有2个缺点:容易过拟合,以及计算量过大
- 为节省内存消耗,先将分辨率降低,再堆叠使用Inception module
- 最后一个全连接层,是为了更方便的微调,迁移学习
- 网络中间层特征对于分类也具有判别性
- 学习率下降策略为每8个epochs下降4%(loss曲线很平滑)
- 数据增强指导方针:1. 尺寸在8%-100%;2. 长宽比在$[3/4, 4/3]$; 3. 光照畸变有效
- 随机采用差值方法可提升性能
- 实际应用中没必要144 crops
10.改进1 V2 批标准化
在GoogLeNet-V1 基础上加入BN层,同时借鉴VGG的小卷积核思想,将$5\times 5$卷积替换为2个$3\times3$卷积,提出了GoogLeNet-V2。
研究成果:
- 提出BN层:加快模型收敛,比googlenet-v1快数十倍,获得更优结果
- GoogLeNet-v2 获得ILSVRC 分类任务 SOTA。BN使模型训练加快14倍,并且可显著提高分类精度,在Imagenet分类任务中超越了人类的表现。
- 开启神经网络设计新时代,标准化层已经成为深度神经网络标配。在Batch Normalization基础上拓展出了一系例标准化网络层,如Layer Normalization(LN),Instance Normalization(IN),Group Normalization(GN)
相关研究:
- ICS(Internal Covariate Shift,内部协变量偏移)现象:输入数据分布变化,导致的模型训练困难,对深度神经网络影响极大。
- 白化(Whitening):为了解决ICS,可以使用白化的方法,去除输入数据的冗余信息,使得数据特征之间的相关性较低,所有特征具有相同方差。依照概率论,$N(x)=(x-\text{mean}/\text{std})$,使得$x$变为0均值,1标准差。
BN 优点:
- 可以用更大学习率,加速模型收敛。针对类似Sigmoid的饱和激活函数,加上BN层后,可采用较大学习率。
- 可以不用精心设计权值初始化
- 可以不用dropout或较小的dropout。. 充当正则,顶替Dropout加入BN层后,将当前样本与以前样本通过统计信息联系起来,相当于某种约束,经实验表明可减轻Dropout的使用。
- 可以不用L2或者较小的weight decay
- 可以不用LRN(local response normalization)
10.1 BN层
批:一批数据,通常为mini-batch
标准化:使得分布为 mean=0, std=1
- 存在的问题:使神经元输出值在sigmod的线性区,削弱了网络的表达能力。
- 解决办法:$y^{(k)}=\gamma^{(k)}\widehat{x}^{(k)}+\beta^{(k)}$。采用可学习参数$\gamma$和$\beta$,增加线性变换,提升网络表达能力,同时提供恒等映射的可能(当$\gamma^{(k)}=\sqrt{\operatorname{Var}[x^{(k)}]}$和$\beta^{(k)}=\mathrm{E}[x^{(k)}]$时,BN层变为恒等映射,不改变神经元的输出值。$\widehat{x}^{(k)}=\frac{x^{(k)}-\mathrm{E}\left[x^{(k)}\right]}{\sqrt{\operatorname{Var}\left[x^{(k)}\right]}}$)
具体操作:
- 在mini-batch上计算均值
- 在mini-batch上计算标准差
- 减去均值,除以标准差,$\epsilon =1\times10^{-5}$,避免分母为0
- 线性变换,$\gamma$和$\beta$实现缩放与平移。
此时存在的问题:mini-batch的统计信息充当总体是不准确的
解决办法:采用指数滑动平均(Exponential Moving Average)来估计整体的均值,具体操作如下,公式中,$a_t$为当前值,$\text{mv}_t$为指数滑动平均值,$\text{decay}$控制权重衰减的速度。
展开表示为:
$\text{mv}_1=(1-\text{decay})a_1$
$\text{mv}_2=\text{decay}\times\text{mv}_1+ (1-\text{decay})a_2=\text{decay}(1-\text{decay})a_1+ (1-\text{decay})a_2$
$\text{mv}_3=\text{decay}^2(1-\text{decay})a_1+ \text{decay}(1-\text{decay})a_2+(1-\text{decay})a_3$
当$t-i>C$,$C$为无穷大的时候,有:
所以,算法的核心部分可以表示为:
算法的整体流程如下:
10.2 GoogleNetV2网络结构
对V1的改进:
- 激活函数前加入BN
- $5\times5$卷积替换为2个$3\times3$卷积(小卷积核结构)
- 第一个Inception模块增加一个Inception结构
- 增多$5\times5$卷积核
- 尺寸变化采用stride=2的卷积(不再使用池化操作)
- 增加9层(10-1层)到 31层(10表示inception数量),使用了更多的卷积核
加入BN的卷积层:
1 | class BasicConv2d(nn.Module): |
10.3 实验
其使用的是tanh激活函数,从下图中可以发现:
- 红色为未加入BN层的,在几个epoch后,其分布主要集中在两侧,说明已经落入了激活函数的饱和区间(在后面的几个epoch中,如>6个epoch后,梯度很小,梯度不会更新了),而加入BN层后,可以拉至0均值附近,避免进入饱和区,其分布会相对均匀。
10.4 nn.batchnorm
1 | torch.nn.BatchNorm1d(num_features, |
- num_features – 一个样本的特征数量(最重要!!)
- eps – 为数值稳定性而加到分母上的值$\epsilon$。
- momentum – 移动平均的动量值。
- affine – 一个布尔值,当设置为真时,此模块具有可学习的仿射参数。
1 | torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, |
1 | torch.nn.BatchNorm3d(num_features, eps=1e-05, momentum=0.1, |
说明:此处的更新方式与论文中略有不同:
11.改进2 V3 改进Inception
研究成果:
1.提出Inception-V2 和 Inception-V3, Inception-V3模型获得 ILSVRC 分类任务SOTA
2.提出4个网络模型设计准则,为模型设计提供参考
3.提出卷积分解、高效降低特征图分辨率方法和标签平滑技巧,提升网络速度与精度
| 模型 | 时间 | top-5 |
|---|---|---|
| AlexNet | 2012 | 15.3% |
| ZFNet | 2013 | 13.5% |
| VGG | 2014 | 7.3% |
| GoogLeNet | 2014 | 6.6% |
| GoogLeNet v2 | 2015 | 4.9% |
| GoogLeNet v3 | 2015 | 3.5% |
总结:网络设计准则:
1.尽量避免信息瓶颈,通常发生在池化层,即特征图变小,信息量减少,类似一个瓶颈。
2.采用更高维的表示方法能够更容易的处理网络的局部信息。
3.大的卷积核可以分解为数个小卷积核,且不会降低网络能力。
4.把握好深度和宽度的平衡。
11.1 卷积分解
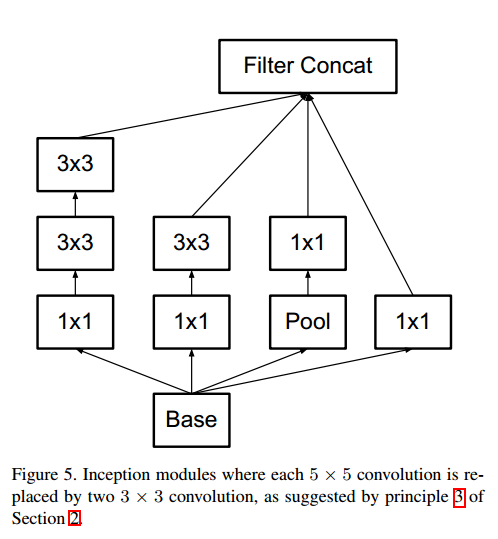
第一种分解:大卷积核分解为小卷积核堆叠,1个$5\times5$卷积分解为2个$3\times3$卷积,参数减少$1 -(9+9)/25 = 0.28%$(在VGG中有详细的介绍)
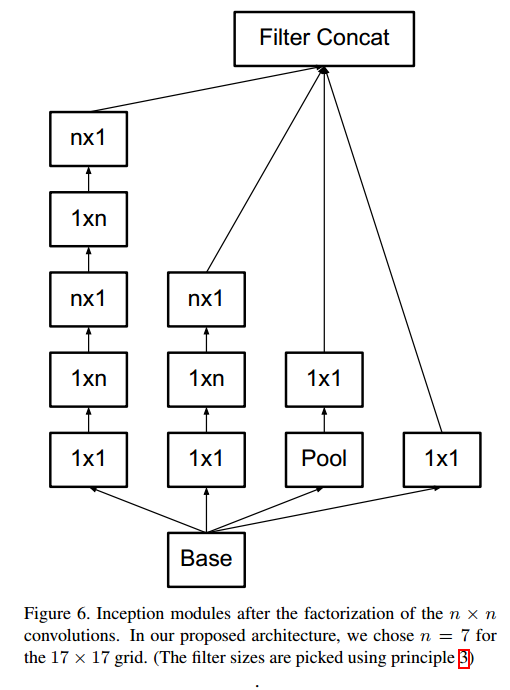
第二种分解:分解为非对称卷积(Asymmetric Convolutionals)1个$n\times n$卷积分解为$1\times n$卷积 和$n\times 1$卷积堆叠。对于$3\times 3$而言,参数减少 $1 - (3+3)/9 = 0.33$。注意事项:非对称卷积在后半段使用效果才好,特别是特征图分辨率在$12\sim20$之间,本文在分辨率为$17\times17$的时候使用非对称卷积分解。
11.2 辅助分类层的改进
GoogleNetV1中提出辅助分类层,用于缓解梯度消失,提升底层的特征提取能力,本文对辅助分类层进行分析,得出结论:
- 辅助分类层在初期起不到作用,在后期才能提升网络性能,因此移除第一个辅助分类层不影响精度。
- 辅助分类层可辅助低层提取特征是不正确的
- 辅助分类层对模型起到正则的作用
- googlenet-v3只在$17\times17$特征图结束接入辅助分类层
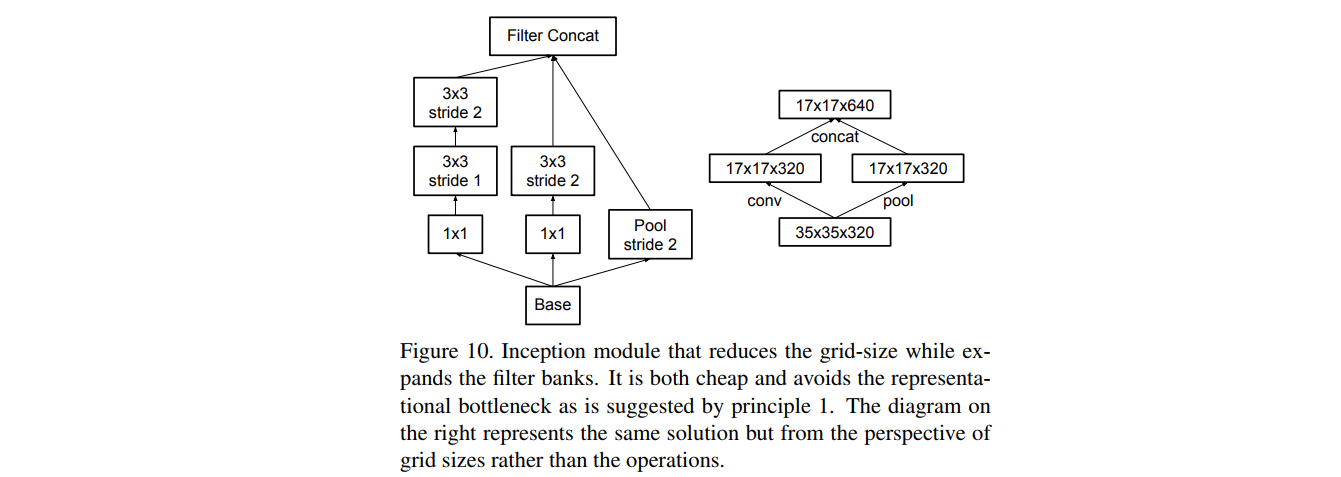
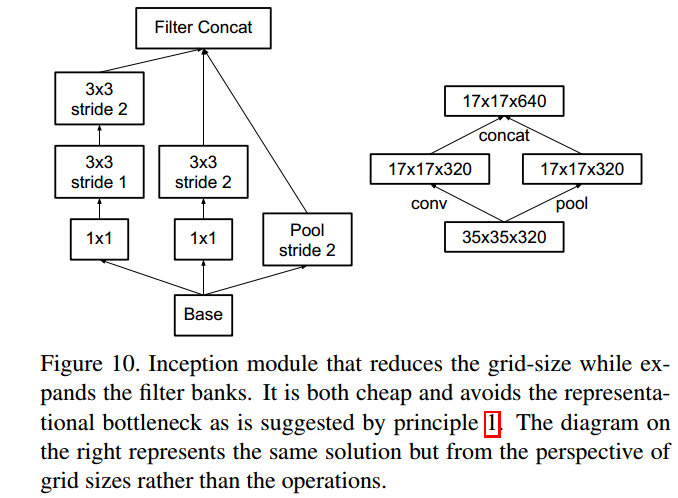
11.3 高效特征图下降策略
- 特征图下降方式探讨:传统池化方法存在信息表征瓶颈(representational bottlenecks)问题(违反模型设计准则1),即特征图信息变少了。
- 简单解决方法:先用卷积将特征图通道数翻倍,再用池化。
- 存在问题:计算量过大
- 解决方法:用卷积得到一半的特征图,用池化得到另一半的特征图。
- 高效特征图分辨率下降策略:用卷积得到一半特征图,用池化得到一半特征图。用较少的计算量获得较多的信息,避免信息表征瓶颈( representational bottlenecks)
- 该Inception-module用于$35\times 35$下降至$17\times 17$,以及$17\times17$下降至$8\times8$。下图中右侧为左侧的简化:
11.4 标签平滑
传统的ont-hot编码中存在的问题:导致过拟合
提出了标签平滑,把one-hot中概率为1的那一项进行衰减,衰减的那部分自信度平均分到每一个类别中。
举例:4分类任务,$\text{label}=(0,1,0,0)$
标签平滑后:
标签平滑公式:
交叉熵(Cross Entropy):$H(q,p)=-\sum_{k=1}^k\log(p_k)q_k$,其中$q$为one-hot向量。
标签平滑:将$q$标签平滑为$q’$,让模型输出的$p$分布去逼近$q’$
- $q’(k|x)=(1-\varepsilon )\delta_{k,y}+\varepsilon u(k)$,其中$u(k)$为一个概率分布,这里如果采用均匀分布,则可以得到:$q’(k|x)=(1-\varepsilon )\delta_{k,y}+\frac{\varepsilon }{k}$
- 所以标签平滑后的交叉熵损失函数为:
推导:
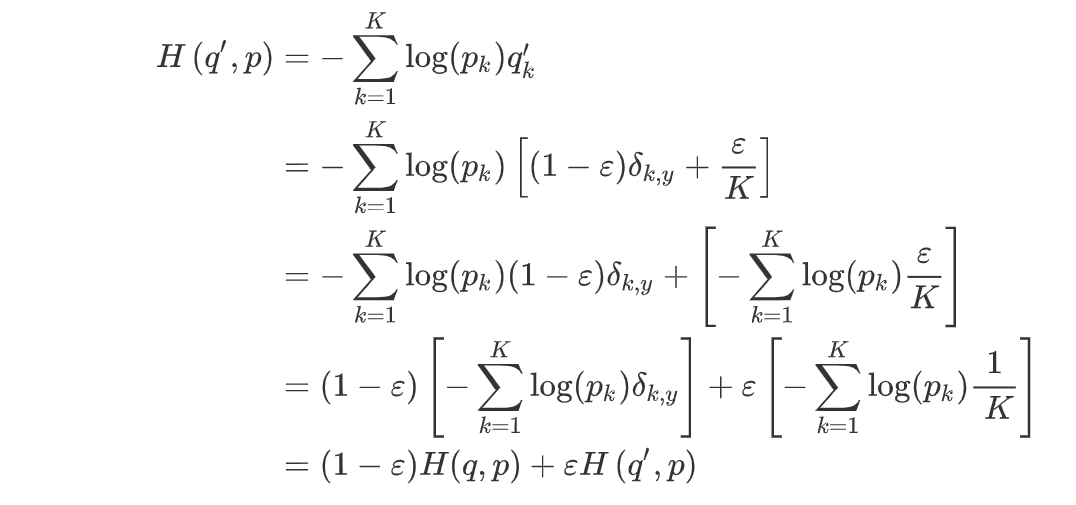
即:
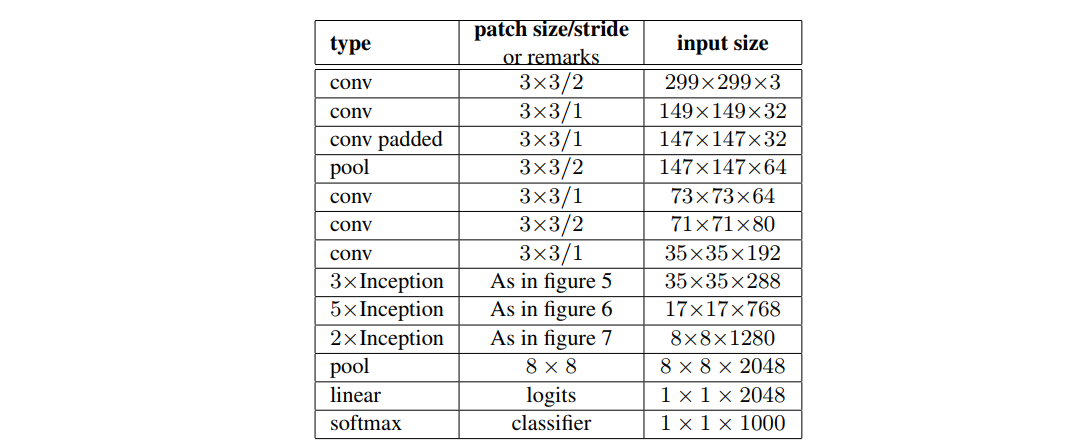
11.5 模型结构
针对V1的变化:
- 采用3个$3\times3$卷积替换1个$7\times 7$卷积,并且在第一个卷积就采用stride=2来降低分辨率
- 第二个$3\times3$卷积,在第2个卷积才下降分辨率
- 第一个block增加一个inception-module,第一个inception-module只是将$5\times5$卷积替换为2个$3\times3$卷积。
- 第二个block,处理$17\times17$特征图,采用非对称卷积。
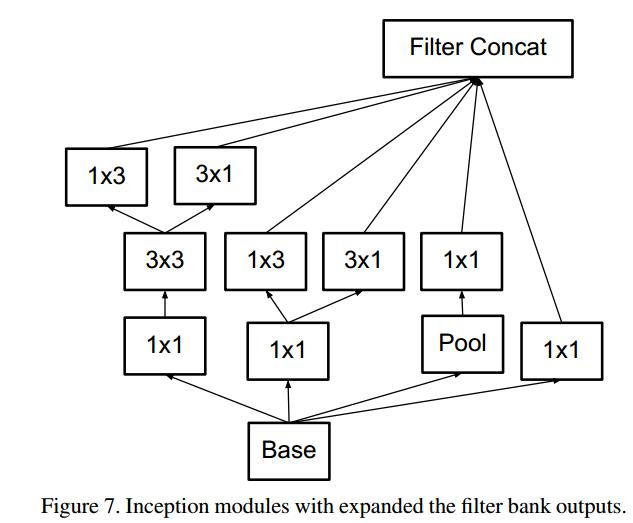
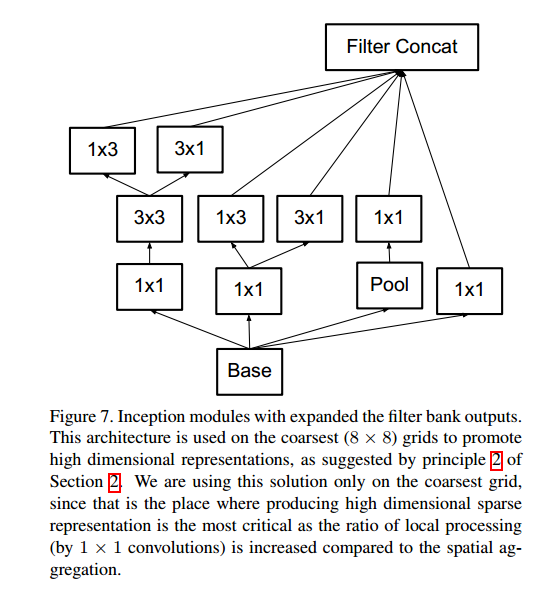
- 第三个block,处理$8\times8$特征图,遵循准则2,提出拓展的卷积
- 最后输出2048个神经元(V1是1024个神经元)
拓展的卷积结构如下(InceptionV2结构):
Inception V3对V2的改进:
- 采用RMSProp优化方法
- 采用Label Smoothing正则化方法
- 采用非对称卷积提取$17\times17$特征图
- 采用带BN的辅助分类层
11.6 各个Inception结构的代码
核心部分代码:只保留了init和forward两个函数
1 | class Inception3(nn.Module): |
(核心)基本组件:InceptionA、InceptionB、InceptionC、InceptionD、InceptionE、InceptionAux、BasicConv2d
InceptionA
代码与论文的差异:
(1) $3\times3$卷积部分多了1个$3\times3$卷积;
(2) $5\times5$卷积并没有用2个$3\times3$卷积替换
1 | class InceptionA(nn.Module): |
附:论文原文
GoogleNetV1:
GoogleNetV2:加入BN层
GoogleNetV3:改进Inception,提出InceptionV2,InceptionV3